I made some changes to the example that we were working on today so that it will run on Wonderfl.net (a great resource for learning AS3). Press “fork” and you can edit, compile, and run the code in any browser:
This post is a proof of concept that describes how to connect N900 to Arduino using BlueSMiRF Gold. Once it is working, you can send charactors to the Arduino. Arduino returned the same characters immediately to X Terminal. Otherwise you will not see any typed charactors in the terminal.
The LED on the BlueSMiRF turns from flashing a red LED to light up a green LED when communication is successfuly established.
This module is easy to use. It communicates to Arduino via serial communication (TX pin and RX pin) as its operating voltage is from 3.3v up to 6v.
This post describes briefly how to set and get settings of the device. You can use Zterm for Mac to send commands to the device. You basically need to enter command mode to do that from TX-O and RX-I pins.
Arduino code is also attached to test the communication over Bluetooth. The code simply return the same signals.
Here is a technical demo video that you can can control lamp and read proximity sensor to te Flash player on the N900. Source codes and schematics will be updated soon.
Nokia N900 has a bunch of interesting sensors and actuators. This post explain how to read the internal sensors (e.g. accelerometer) and write the actuators (e.g. vibration motor) by accessing sysfs in X Terminal application. Details can be found in Maemo wiki pages
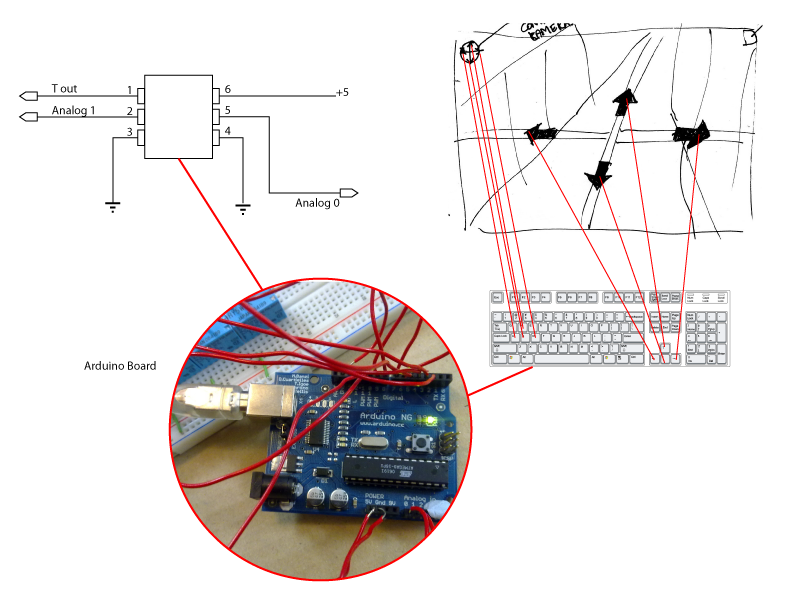
The aim is to make a more fun and physical experience linked to google street view, where the user through movement controls the direction and view of the web service. Furthermore we wanted to stir away from the traditional keys and make a dynamic and fun way to see new parts of the world: Tokyo, Los Angeles, Paris, you decide where to go!
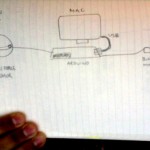
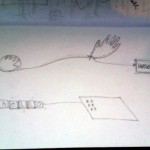
After few different concept ideas, we created an interactive controller for Google Maps. It consists of an Arduino board, an old keyboard, two kinds of sensors; accelerometer sensor – measures tilt and motion, ultrasonic sensors -measures distance and eight switches. Basically, the programme reads the values from the sensors and these control the keyboards’ pre-defined keys. The accelerometer control the camera’s pan and tilt keys(w,a,s,d), whereas, two different sensors (Ping))) ultrasonic sensor) control the horizontal movement in the the street (arrow keys).
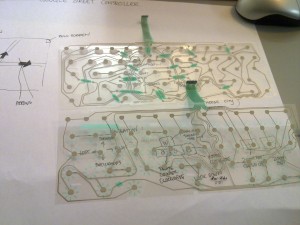
Keyboard and sketches
Distance measurement controlling forward, back, left and right
Setup: circuit between arduino and keyboard with the switches
A.: Wanted to use a MIDI keyboard as the output device hooked up to a bicycle, with a variation in sounds depending on cycing style used. The plan was to trigger events using hall effect sensors detecting magnets connected to pedals and wheels hence rotating past the sensor at speeds specified by the cycler.
Went to the recycling sensor to find a MIDI keyboard. Couldnt find one but found an old exercise bike bought for €5.
The plan now is to get output from cycling action on the exercise bike to manipulate images and sound.
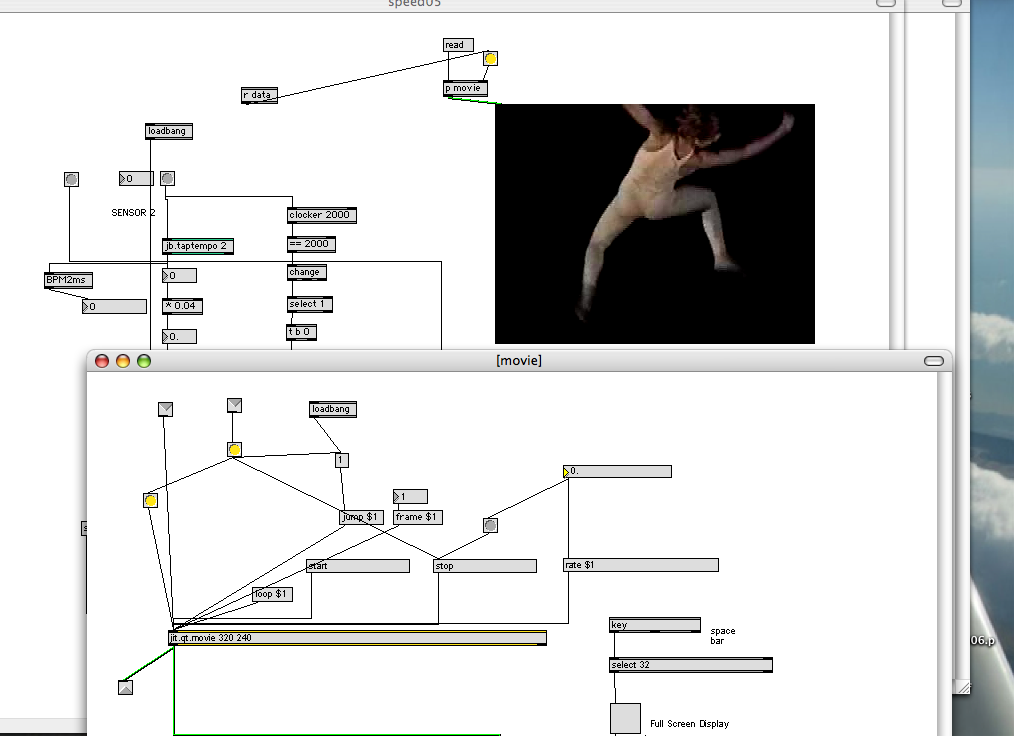
B.: Fitting bike with sensors and creating first schematic using MAX/MSP. We used neodymium magnets, salvaged from broken hard-drives and mounted them on the rim of the rear wheel. As the wheel rotated, the magnets passed through the magnet sensor and output a digital signal via a micro-controller.
The incoming sensor data was sent to Max/MSP and enabled us to determine the number of rotations per second, i.e., the number of times the magnet passed through the hall sensor. From this data, we were able to calculate speed and distance. We also used the rotational sensor data to control the playback rate of the film sequence as well as the audio playback rate. As the cycler pedaled faster, the playback speed increased . The result was a “Cycling DJ” allowing interaction with both the visual and audio environments.
C.: Recorded cycling journey
D.: Callibration of cycling movement and video action.
Max/MSP code. More info email: simon@therealsimon.com