Nov 11, 2009 4
Elle E. Dee & The Electrotastics
Project by Jonathan Cremieux & Juha Salonen
The aim was to create simple and fun controllers for sound and image using diverse electronic components and the Arduino platform.
Nov 11, 2009 4
Project by Jonathan Cremieux & Juha Salonen
The aim was to create simple and fun controllers for sound and image using diverse electronic components and the Arduino platform.
Nov 9, 2009 1
Course project by Heidi Holm & Daniel Suominen – Designing Interaction with Electronics workshop 2009 at Mlab, Helsinki
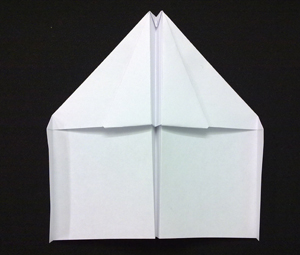
Paper Plane Pilot
Day 1: Developing the idea. A simple game where you pilot a paper plane through the Media Lab. The controlling of the plane involves hand gestures and blowing air from your mouth. This is achieved by using accelerometer and air sensor.
Nov 9, 2009 Comments Off on Course materials for Designing Interaction with Electronics workshop 2009 at Mlab
Oct 20, 2009 Comments Off on Nokia Push (hacking on New N900)
Nokia Push
http://blogs.nokia.com/pushn900/
Aug 25, 2009 Comments Off on Introduction to Designing Interaction with Electronics workshop 2009 at Media Lab Helsinki
The purpose of Interaction Design with Electronic workshop is an “intensive hands on” workshop to learn how to turn your idea into a real physical object using electronics and microcontrollers. These tools and techniques will be useful for rapid prototyping in physical interaction design and/ or installation work.
Aug 11, 2009 Comments Off on Final presentations from Designing Interaction with Electronics 2009 at UCIT
Aug 10, 2009 1
The heatseeker was a quickly build robot to demonstrate the Parallax Boe-Bot robot system. The robot uses two servo motors to move around and a remote sensing infra red thermometer for measuring temperatures in front of the robot.
The robot seeks heat sources by turning around until the thermometer measures a warmer spot, which makes the robot to move straight towards the spot. If the warmer spot is lost, seeking with turning around starts over.
Heat seeker from Harri Rantala for the UCIT Interaction Design with Electronics Workshop 2009 on Vimeo.
Aug 9, 2009 1
This demo is implemented with S60 Python connected to BASIC Stamp 2 via Sparkfun BlueSMiRF Silver bluetooth module.
Aug 7, 2009 Comments Off on The UnExpressiveBrush
The UnExpressiveBrush was built to test the capabilities of the ultrasound and acceleration sensors by Parallax. The intention was to build a system where one could simulate painting with a very wet brush. With it one can paint by sprinkling with vigorous brush movements in front of a canvas. However, we cut a few corners and ended up with a system that was significantly less usable than the original plan. First of all, we did not build a paint sprinkling simulation. Instead we used GIMP and its ready-made brushes for the painting. We also did not use the acceleration information from the brush for anything else except sending a mouse down event whenever a certain threshold was exceeded and a mouse-up when acceleration returned to lower values. As a result we had the ability to sprinkle paint with high acceleration movements along one axis and to spread paint by tilting the brush to one direction. The same movements were used to select colors from the palettes available in GIMP. The laptop keyboard was needed for switching windows.
The UnExpressiveBrush from Poika Isokoski and Harri Rantala.
Aug 7, 2009 Comments Off on The SonarHat
The Sonar Hat consists of a hat with a Parallax Board of Education tied on top. A forward facing PING))) ultrasonic sensor measures distances and a piezo speaker plays a tone based on the distance. The idea was, of course, to see if one could – at least in part – substitute vision by ultrasound navigation akin to what bats do.
The SonarHat from Poika Isokoski on Vimeo.
Aug 7, 2009 Comments Off on Colour Selector from UCIT course
Here are some details of the colour selector made by Jaakko Hakulinen.
The application maps data from accelerometer to colour and uses LEDs to display this colour. The x-y axis data is converted into polar coordinates and angle is then used as hue and distance as colour intensity. Brightness is always maximum. This HSB value is then converted to RGB values. In addition, touch sensor is used to switch between reading the accelerometer data and controlling the LEDs using PWM.
The system runs entirely on BS2. It does send some debug output, which can be read on PC side.
The colour selector from Jaakko Hakulinen on Vimeo.
Aug 6, 2009 Comments Off on UCIT: Vibrotactile radar using two PING))) ultrasonic sensors
This is quite simple practice work build for the UCIT Interaction Design with Electronics workshop 2009 held by Michihito Mizutani. The work consists of parts. 1) BS2 reads the distance information from two PING))) ultrasonic sensors and sends them through a serial port. 2) A PC running a dedicated PD (Pure Data, http://puredata.info/) patch processes the data and sends audio signals to left and/or right channels depending on the situation. 3) The audio output is then amplified and played through two C-2 vibrotactile voice-coil actuators. 4) The PD patch redirects the distance information to another PC via WLAN TCP connection where it’s been visualized.
Vibrotactile radar using two PING))) ultrasonic sensors from Jussi Rantala and Jukka Raisamo from Univertsity of Tampere, Finland.
Aug 6, 2009 Comments Off on Temperature probe: measuring temperature
Jul 5, 2009 Comments Off on Course materials for Interaction Design with Electronics workshop 2009 at UCIT
Date: August 3 – 7, 2009
Location: Graduate School in User-Centered Information Technology (UCIT) in Tampere, Finland
Course materials:
Jul 4, 2009 2

BlueSMiRF Silver is a bluetooth module from Sparkfun Electronics. This post describes how you can set up connectivity between your PC and BlueSMiRF.
Apr 15, 2009 Comments Off on PWM by AVR-GCC
Arduino NG supports PWM with three pins – 9, 10 and 11. Those pins are assigned to Atmega8 PB1(OC1A), PB2(SS/OC1B) and PB3(MOSI/OC2) pings
PB1 (OC1A) – Arduino Pin 9
PB2(OC1B) – Arduion Pin 10
PB3(MOSI/OC2) – Arduion Pin 11
Apr 13, 2009 1
Interrupts are interruptions from the main program flow triggered by some event. Interrupts are not supported by BASIC Stamp but Arduino can support it by including a library. AVR MacPack (AVR-GCC) also can support it by including <avr/interrupt.h>. Interrupts is very useful function because you don’t have to listen to the external event all the time in your code. If you assign the external event as interrupts, AVR jumps to particular function when the event happens and returns to current location of the code.

